Здравствуй уважаемый читатель.
И так, проработав много страниц в интернете я определился с концепцией получения сигналов со штатной аппаратуры наших машин. Сначала текстовая информация, а потом картинки со схемами. Я постарался сделать так, что бы схема была Вам понятна. Приступим.
Главный для меня сигнал — это сигнал скорости / пройденный путь. В нашей машине за это отвечает датчик оборотов. Прошу Вас не путать с датчиком скорости. Датчик оборотов — это импульсный датчик который выдаёт 4 импульса за один оборот (проверка количества импульсов будет проведена завтра). Датчик скорости — это обычный электромотор от скорости вращения которого будет изменяться напряжение на выходе датчика. Вообще датчик скорости, как пишут на просторах интернета, так называемая подстраховочная фигня. Я с этим в принципе не согласен. Изучив подробнейшим образом принципиальные схемы, я пришёл к выводу, что датчик скорости используется во многих других блоках автомобиля. Сейчас я не могу сказать точно где именно да бы не засорять голову не нужной для меня, пока, информацией. И так сигнал с датчика оборотов поступает на 29 вывод модуля TMC который находится под обшивкой на стороне пассажира, с правой стороны (фото прилагается). Можно снимать сигнал именно с 29 вывода датчика и посылать его в микроконтроллер (МК), далее обрабатывать его и получать точную скорость. А можно получать сигнал уже обработанный блоком TCM который выходит с 40 вывода блока TCM и приходит на приборную панель, на 26 вывод (фото прилагается). Я пока не знаю в каком виде этот сигнал поступает на приборную панель, завтра буду изучать на автомобиле. Далее мысли следующие. Если сигнал с датчика оборотов импульсный, и сам датчик считает сигнал с главной шестерёнки ведущего вала (тот который к колёсам подключен), я надеюсь, что я правильно описал эту шестерёнку, то таким образом можно считать пройденный путь. Это мне надо для напоминалки по ТО жидкостей, смазки и фильтров. И так же смогу получать точную скорость, которую я буду использовать для сигнализации превышения скорости на разных участках дороги.
А теперь если внимательно рассмотреть схему приборной панели можно увидеть, что туда приходят множество различный сигналов со всевозможных датчиков. Единственный минус это то, что сигнал либо есть либо его нет. О каких либо измерениях и речи быть не может. За то есть так называемые тревожные сигналы, вот их то можно попробовать измерить. Я устал, хочу спать. Выкладываю фото с кратким описанием, а завтра подкорректирую статью и можно будет прочить окончание моей мысли.
Прошу всех кто хоть как то понимает то о чём я написал прокомментировать мои мысли и правильность направления действий. Мне важны Ваши идеи в этом проекте. Прошу Вас следить за изменением в теме бортового ПК и помочь в постройке данного девайса. Всем спасибо за помощь.
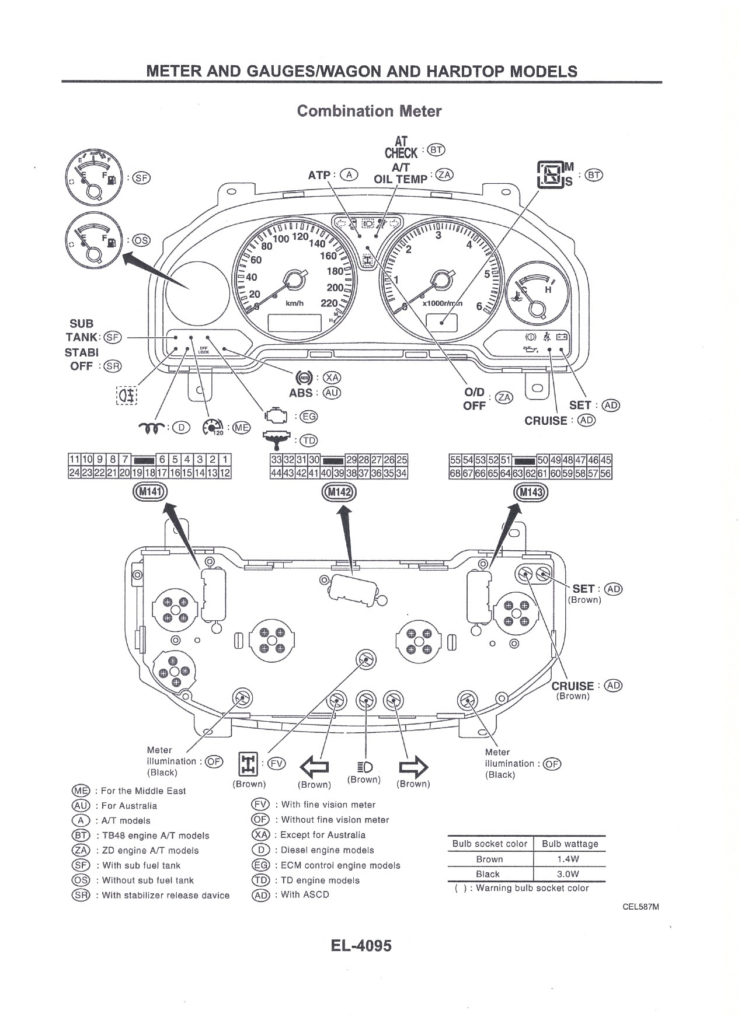
Схема разъемов приборной панели.
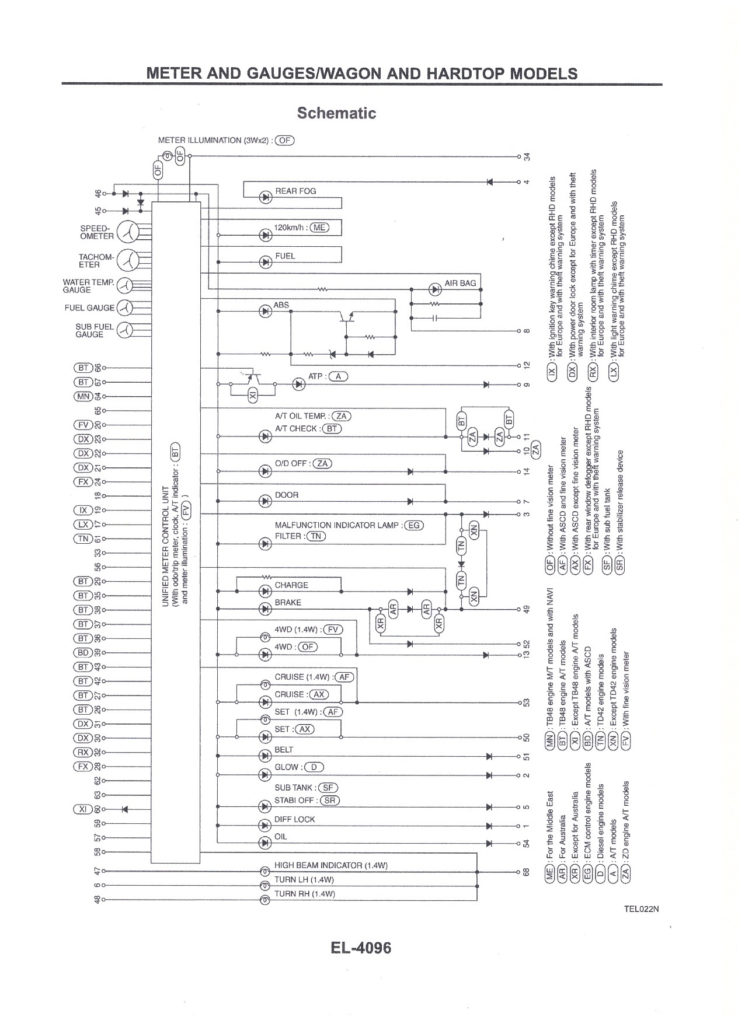
Электрическая принципиальная схема приборной панели. Можно увидеть всевозможные световые индикаторы.
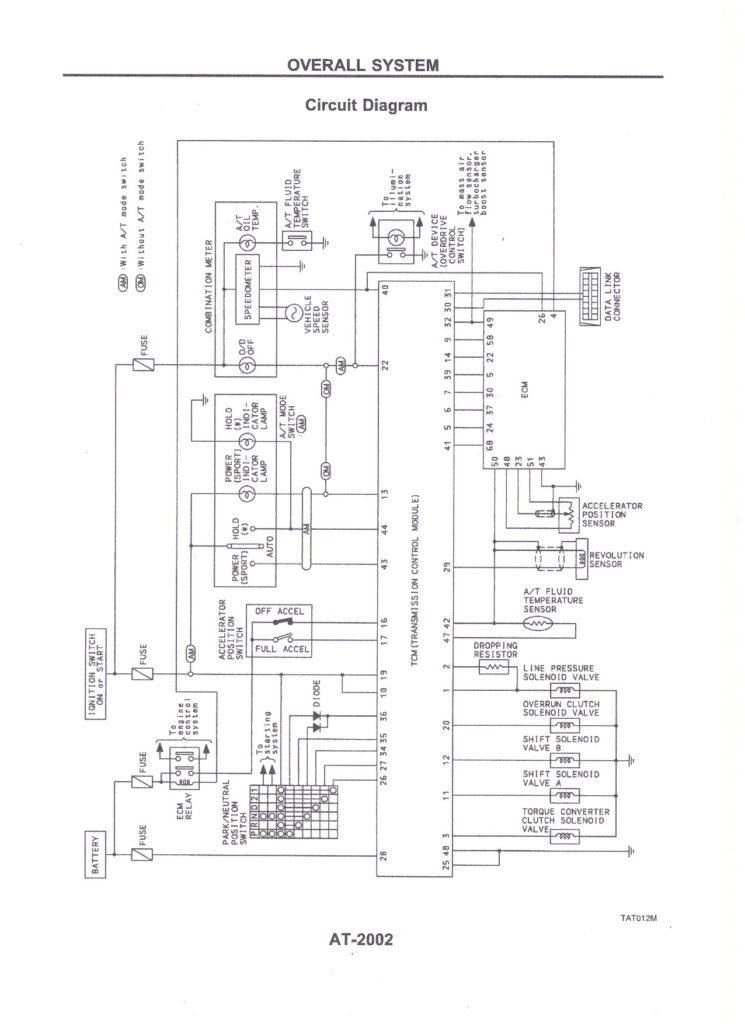
Принципиальная схема модуля TCM модуль управления АКПП. В нем явно видно куда подключается датчик оборотов и видно как обработанный сигнал поступает на спидометр.
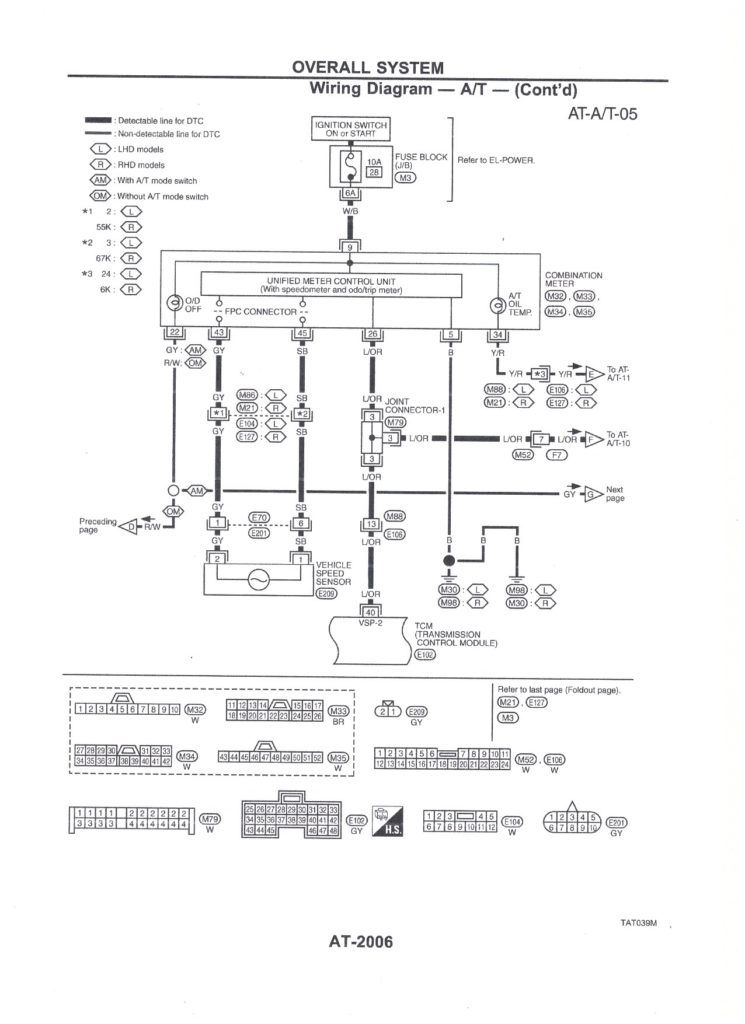
Более детальная схема соединения блока TCM с приборной панелью.
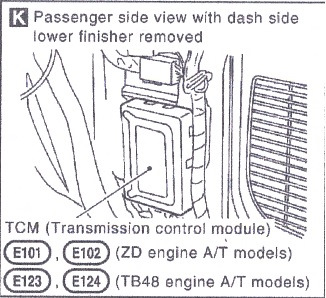
место расположения модуля TCM
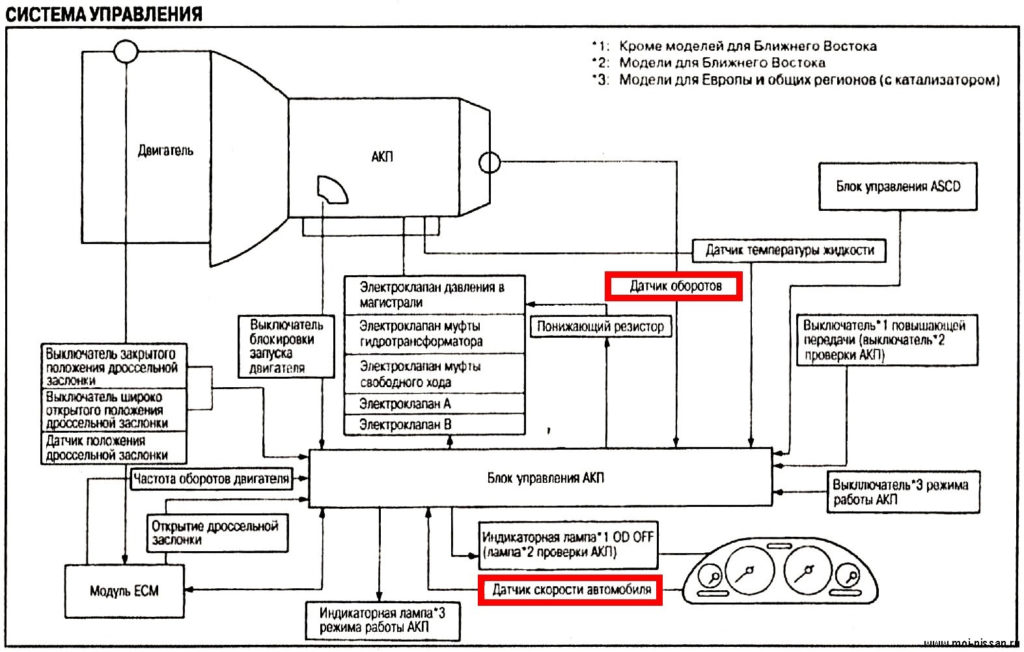
Блок схема подключения датчика скорости и датчика оборотов.
Наступил следующий день и я продолжаю. Сегодня была вскрыта обшивка у ног пассажира и я увидел блок TCM (мозги АКПП).

Расположение TCM
Далее я подпаял три провода к выводам разъема 48-минус питания/земля, 29-напрямую к датчику оборотов, 40-обработанный блоком TCM сигнал с датчика оборотов. Подключил двухканальный осциллограф (запись видео осциллограмм приложу через 3 часа) и поехал. Каково же было моё приятное удивление когда я сразу же увидел нужный мне результат.
Теперь подробнее. На выводе 40 я увидел прямоугольные импульсы с амплитудой 12 вольт скважностью 50 и частота импульсов была пропорциональна скорости. Супер, то что мне и нужно. Ну а на 29 выводе то же были импульсы но только треугольной формы и так же частота была пропорциональна скорости. А теперь о замерах. Я понял, что измерять скорость каждый метр нет смысла. Контроллер просто будет работать только на измерение скорости. Опытным путём я подберу интервал измерения скорости так, что бы и цифры не скакали на индикаторе (если кто захочет смотреть на цифровой спидометр) и не тормозили показания с изменением скорости. Скорость не будет усредняться, для этого я просто не буду показывать второй знак после запятой. А теперь про расстояния. Как узнать пройденный путь? Да просто. В конкретном моём случае это 0.8 метра за один такт датчика оборотов. Как я это узнал? Я начертил риску на ободе колеса, и так же установил риску начало движения. Смотря на осциллограф и считая такты датчика оборотов я начал движение, а дочка считала количество оборотов колеса. Так вот на 30 тактов я проехал 24 метра. Из этого нужно найти скольким метрам равен 1 такт 24 метра / 30 тактов = 0.8 метра. Скорость соответственно так же легко найти. Если скорость равна 60 км в час то за 1 секунду автомобиль проедет 60000 метров / 3600 секунд = 16.6 метров за одну секунду. Поясню: 60 км нужно перевести в метры = 60*1000=60000 метров. А время 1 час = 3600 секунд. Теперь нужно узнать сколько тиков делает датчик оборотов за 16,6 метров. 0,8 метров за один тик * 16.6 метров = 13,28 тиков. Округлим это в нашу положительную сторону (что бы не превысить скорость и остался маленький запас) =13 тиков.
Значит МК должен должен знать сколько тиков он посчитает за, предположим, 10 секунд. Зная этот результат можно узнать с какой скоростью двигался автомобиль. Теперь осталось собрать простую схему на МК, подключить индикатор, к примеру двухстрочный, собрать согласование уровней (мы помним, что амплитуда сигнала на 40 выводе равна 12 вольтам), для МК нужно подать 3.3 вольта уровень сигнала, написать тестовый код и сделать первые испытания.